1、功能描述
板球系统是机器视觉与控制技术在工程领域结合的典型模型。板球系统是一个多变量、非线性控制系统,通过调整平板来控制小球的实际位置和运动轨迹。其以摄像头采集的图像信息和角度编码器采集的电机位置信号为反馈信息,得到小球的位置反馈,并以此为依据控制动态系统。平台可以进行经典控制理论、现代控制理论、运动控制、数字图像处理等课程实验和研究。
2、技术参数
1、运动控制器
PCIe插卡式,可控制轴数4轴,控制伺服周期为125us,插补周期250us,PID控制周期125us,编码器采样周期125us,模拟量输出刷新周期125us,脉冲最大输出频率1MHz;轴通道增量式编码器输入4路;辅助增量式编码器输入2路;模拟量输入8路,输入范围±10V,分辨率12bit,模拟量输出4路,输出范围±10V,分辨率16bit;数字量输入16路;数字量输出16路;每轴带专用的正负限位、Home信号、驱动报警信号、驱动使能信号,驱动复位信号及编码器Index高速捕获信号;
2、开放性支持
提供Windows系统下的VC、VB及Delphi动态链接库,支持S-曲线模式、梯形曲线模式、速度控制模式及电子齿轮模式,支持点位运动、同步运动、PT运动、PVT运动、多轴同步运动、圆弧插补运动及直线运动及多轴协调运动轨迹速度规划。
2、驱动器:2个
紧凑的开放式结构设计,可适用于直流无刷电机,交流无刷电机,直流有刷电机和二相步进电机的控制。
控制模式:力矩,速度,位置:电子齿轮,轨迹跟踪,路径规划:步进电机仿真:外部变量控制
单轴或多轴控制:存储运动指令的单机操作
通讯:RS-232 串口通讯、CAN总线2.0B,高达1Mbit/s
数字输入/输出和模拟输入,4 个通用输入/4 个通用输出;
增量编码器、数字霍尔传感接口、线性霍尔传感接口
3个模拟输入,范围+/-5V;
驱动电源:48V,逻辑电源:5V,输出电流:额定 3A,峰值 6A
3、电机
2个,输入电压:24 V,电压常数:6.80 V/krpm ,转矩常数:9.2 oz-in/A,,空载电流:0.3Amps、空载转速:3529RPM,堵转电流: 7.0 Amps。编码器分辨率1000pulse/r,长线驱动。
4、行星减速机
2个,额定输出扭矩:12 Nm,maximum径向力:385 N,maximum转速:8000 r/min,故障停止扭矩:24 N·m,maximum轴向力:250N,回程间隙标准:≤12arcmin,转动惯量:0.017 kg/cm,重量:0.4 kg,噪音 :55 dB(A),满载效率:97%,抗扭刚性:1Nm/arcmin,减速比1:8。
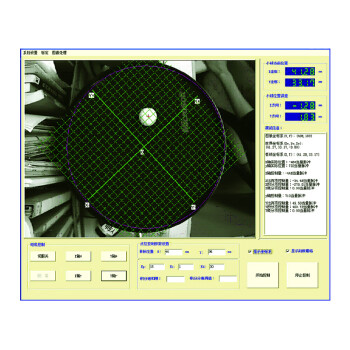
5、视觉系统
系统组成:相机、镜头、视觉处理软件及连接线缆,高度可调节;
芯片类型:CMOS,全局快门,相机分辨率1280*1024,千兆以太网接口;
曝光时间:10us~1s;
触发方式:软件触发/硬件触发/自由运行,帧率85fps;
图像格式:Mono8,BayerRG8/10/10Packed, BayerGB8/10/10Packed,UV422Packed;
6芯Hirose接口:1路光耦隔离输入,1路光耦隔离输出,1路不带光耦隔离可配置输入输出;
支持PoE供电,支持2组用户自定义配置保存;
Sensor:1/2";
配可视化视觉处理软件。
6、控制本体
尺寸:475*305*615mm;球盘直径280mm;白色小球直径30mm;X轴、Y轴安装夹角90°。
7、控制软件
支持Windows7/10操作系统,基于C++的平台控制软件(含源代码)软件。
8、实验内容
系统介绍
坐标系建模
物理模型建立
动力学分析
控制结构及控制流程
摄像机标定及小球位置计算
板球系统的PID控制










 品质承诺
品质承诺  破损补寄
破损补寄  急速物流
急速物流 









{kind=link}
{kind=link}
{kind=link}
商品评价
100%好评
共有人参与评分评价商品